




機器人終端夾具是一種用於機器人末端執行器(End Effector)的設(shè)備,用(yòng)於夾持、固定、操縱和處理工件(jiàn)。它通常位於機器人手臂的末端,並與機器人的控製係統連接(jiē),用(yòng)於實現機(jī)器人在工業生產線上的自動(dòng)化操作。
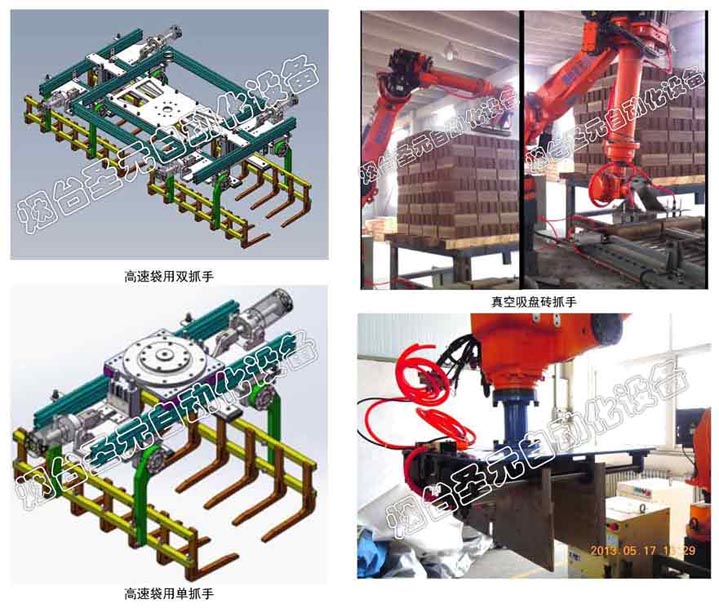
機器人終端(duān)夾具的設計和製造通常根據具體的應用需求而定,可以具有各種不同的形狀、尺寸和功能。例如,有些夾具設(shè)計為夾持工件,以便機器人將其移動到(dào)指定位置或進行加工操作;而另一些夾具可能設計為(wéi)固定工具或傳感器,以幫(bāng)助機器人完成特定的任務,如焊接、塗覆、裝(zhuāng)配等。
機器人終端夾(jiá)具的選擇取決於(yú)所需的(de)操作和工件(jiàn)特性,它們通常具有高度(dù)的靈活(huó)性和可定製性,以適應不同的生產需求。這些夾具在工業自(zì)動化中起(qǐ)著至關重要的作用,能夠提高生產效(xiào)率、減少(shǎo)人工成本,並確保產(chǎn)品質量的一致性和可靠性。
